-
1 protection différentielle longitudinale
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
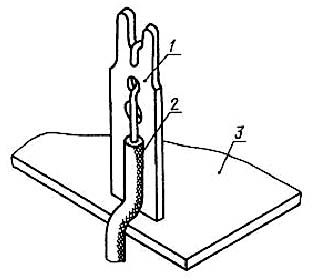
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.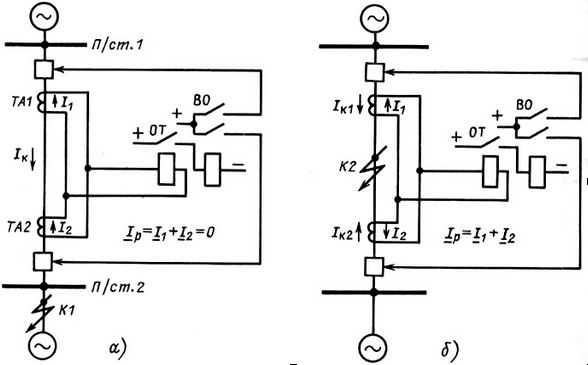
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)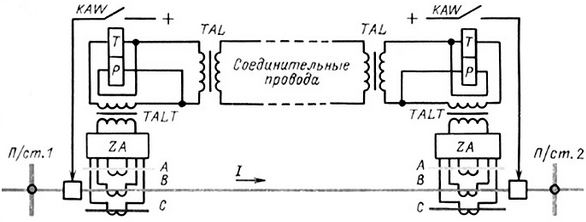
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
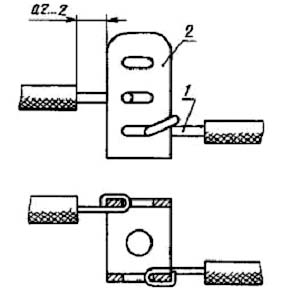
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
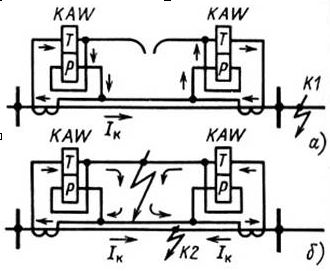
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
Франко-русский словарь нормативно-технической терминологии > protection différentielle longitudinale
-
2 Längsdifferentialschutz, m
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
Немецко-русский словарь нормативно-технической терминологии > Längsdifferentialschutz, m
-
3 line differential protection
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
Англо-русский словарь нормативно-технической терминологии > line differential protection
-
4 longitudinal differential protection
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
продольно-дифференциальная защита
-
[В.А.Семенов. Англо-русский словарь по релейной защите]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > longitudinal differential protection
-
5 Ready Boot
функция ReadyBoot
Если в системе установлено менее 512 МБ оперативной памяти, механизм упреждающего чтения при загрузке ОС Windows Vista не отличается от механизма, использовавшегося при загрузке ОС Windows XP. Если же размер оперативной памяти превышает 700 МБ, то для оптимизации процесса загрузки используется кэш в ОЗУ. Размер этого кэша зависит от общего объема доступной памяти; он достаточно велик, чтобы обеспечить эффективное кэширование, но оставляет при этом достаточно свободной памяти для нормального выполнения процедуры загрузки системы.
После каждой загрузки системы служба ReadyBoost (та же самая служба, которая реализует описанную выше функцию ReadyBoost) в моменты простоя ЦП планирует кэширование для следующей загрузки системы. Она анализирует информацию об обращениях к файлам за пять предыдущих загрузок и определяет, к каким файлам производились обращения, и где эти файлы расположены на диске. Обработанная информация об обращениях сохраняется в папке %SystemRoot%\Prefetch\Readyboot в виде файлов с расширением ".fx", а план кэширования сохраняется в разделе реестра HKLM\System\CurrentControlSet\Services\Ecache\Parameters в виде значений типа REG_BINARY с именами, соответствующими именам внутренних дисков.
Кэширование реализуется с помощью того же драйвера, что и в функции ReadyBoost (драйвер Ecache.sys), но управление заполнением кэша во время загрузки осуществляется службой ReadyBoost. Хотя кэш загрузки сжимается так же, как и кэш ReadyBoost, есть еще одно отличие между управлением кэшем в функциях ReadyBoost и ReadyBoot. В отличие от функции ReadyBoost, в режиме ReadyBoot содержимое кэша не изменяется при операциях чтения и записи, а определяется только обновлениями, вносимыми службой ReadyBoost. Служба ReadyBoost удаляет кэш через 90 секунд после начала загрузки или в случае, если требуется дополнительная оперативная память. Статистика использования кэша записывается в раздел реестра HKLM\System\CurrentControlSet\Services\Ecache\Parameters\ReadyBootStats, как показано на рис. 2. Измерение производительности, проведенное в корпорации Майкрософт, показало, что при использовании функции ReadyBoot производительность увеличивается примерно на 20 процентов по сравнению с технологией упреждающего чтения, используемой при загрузке ОС Windows XP.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Ready Boot
-
6 ReadyBoot
функция ReadyBoot
Если в системе установлено менее 512 МБ оперативной памяти, механизм упреждающего чтения при загрузке ОС Windows Vista не отличается от механизма, использовавшегося при загрузке ОС Windows XP. Если же размер оперативной памяти превышает 700 МБ, то для оптимизации процесса загрузки используется кэш в ОЗУ. Размер этого кэша зависит от общего объема доступной памяти; он достаточно велик, чтобы обеспечить эффективное кэширование, но оставляет при этом достаточно свободной памяти для нормального выполнения процедуры загрузки системы.
После каждой загрузки системы служба ReadyBoost (та же самая служба, которая реализует описанную выше функцию ReadyBoost) в моменты простоя ЦП планирует кэширование для следующей загрузки системы. Она анализирует информацию об обращениях к файлам за пять предыдущих загрузок и определяет, к каким файлам производились обращения, и где эти файлы расположены на диске. Обработанная информация об обращениях сохраняется в папке %SystemRoot%\Prefetch\Readyboot в виде файлов с расширением ".fx", а план кэширования сохраняется в разделе реестра HKLM\System\CurrentControlSet\Services\Ecache\Parameters в виде значений типа REG_BINARY с именами, соответствующими именам внутренних дисков.
Кэширование реализуется с помощью того же драйвера, что и в функции ReadyBoost (драйвер Ecache.sys), но управление заполнением кэша во время загрузки осуществляется службой ReadyBoost. Хотя кэш загрузки сжимается так же, как и кэш ReadyBoost, есть еще одно отличие между управлением кэшем в функциях ReadyBoost и ReadyBoot. В отличие от функции ReadyBoost, в режиме ReadyBoot содержимое кэша не изменяется при операциях чтения и записи, а определяется только обновлениями, вносимыми службой ReadyBoost. Служба ReadyBoost удаляет кэш через 90 секунд после начала загрузки или в случае, если требуется дополнительная оперативная память. Статистика использования кэша записывается в раздел реестра HKLM\System\CurrentControlSet\Services\Ecache\Parameters\ReadyBootStats, как показано на рис. 2. Измерение производительности, проведенное в корпорации Майкрософт, показало, что при использовании функции ReadyBoot производительность увеличивается примерно на 20 процентов по сравнению с технологией упреждающего чтения, используемой при загрузке ОС Windows XP.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > ReadyBoot
-
7 As is shown in Fig. 1
Математика: как показано на Рис. 1 (...) -
8 as shown in Fig.2
Математика: как показано на Рис.2 -
9 star-connected exchanges
тлф свз соединённые звездой АТСIn a national network, as shown in Figure 29.5, the minimum configuration of star-connected exchanges is usually augmented by direct routes interconnecting exchanges where a high community of interest generates sufficient traffic. — В национальной сети, как показано на рис. 29.5, минимальная конфигурация соединённых звездой АТС обычно расширяется за счет прямых трасс, соединяющих АТС, на которых высокая общность интересов генерирует достаточный трафик.
Англо-русский универсальный дополнительный практический переводческий словарь И. Мостицкого > star-connected exchanges
-
10 failure
- сбой (в информационных технологиях)
- сбой (в информационных технологиях)
- разрушение
- повреждение
- отказ (функционального блока)
- отказ (объекта)
- отказ (в работе)
- отказ
- неудачная скважина (по статистической терминологии)
- неудачная попытка
- неудача (разработки или эксперимента)
- неудача
- несрабатывание
- несостоятельность (уравнения)
- неисправность
- недостаток или отсутствие
- авария
авария
Неожиданный выход из строя конструкции, машины, системы инженерного оборудования сооружений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
авария
Опасное техногенное происшествие, создающее на объекте, определенной территории или акватории угрозу жизни и здоровью людей и приводящее к разрушению зданий, сооружений, оборудования и транспортных средств, нарушению производственного или транспортного процесса, а также к нанесению ущерба окружающей природной среде.
Примечание
Крупная авария, как правило с человеческими жертвами, является катастрофой.
[ ГОСТ Р 22.0.05-94]
авария
Опасное техногенное происшествие, создающее на объекте, определенной территории или акватории угрозу жизни и здоровью людей и приводящее к разрушению зданий, сооружений, оборудования и транспортных средств, нарушению производственного или транспортного процесса, а также к нанесению ущерба окружающей природной среде.
[СО 34.21.307-2005]
авария
Разрушение сооружений и (или) технических устройств, применяемых на опасном производственном объекте, неконтролируемые взрыв и (или) выброс опасных веществ
[Федеральный закон от 21. 07.1 997 № 116-ФЗ «О промышленной безопасности опасных производственных объектов»]
[СТО Газпром РД 2.5-141-2005]
авария
Разрушение сооружений и (или) технических устройств, применяемых на опасном производственном объекте, неконтролируемый взрыв и (или) выброс опасных веществ.
[ ГОСТ Р 12.3.047-98]
авария
Разрушение сооружений, оборудования, технических устройств, неконтролируемые взрыв и/или выброс опасных веществ, создающие угрозу жизни и здоровью людей.
[ ГОСТ Р 12.0.006-2002]
авария
Событие, заключающееся в переходе объекта с одного уровня работоспособности или относительного уровня функционирования на другой, существенно более низкий, с крупным нарушением режима работы объекта.
Примечание.
Авария может привести к частичному или полному нарушению объекта, массовому нарушению питания потребителей, созданию опасных условий для человека и окружающей среды. Признаки аварии указываются в нормативно-технической документации.
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
авария
аварийная ситуация
crash
Неустранимая неисправность, приводящая к перерыву в работе и потери части информации. Восстановление работоспособности аппаратных средств обычно осуществляется путем неоперативной замены неисправных модулей на исправные.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- безопасность гидротехнических сооружений
- газораспределение
- пожарная безопасность
- техногенные чрезвычайные ситуации
EN
DE
FR
недостаток или отсутствие
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
несостоятельность (уравнения)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
неудача
провал
—
[Англо-русский глоссарий основных терминов по вакцинологии и иммунизации. Всемирная организация здравоохранения, 2009 г.]Тематики
- вакцинология, иммунизация
Синонимы
EN
неудача (разработки или эксперимента)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
неудачная скважина (по статистической терминологии)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
отказ
Нарушение способности оборудования выполнять требуемую функцию.
Примечания
1. После отказа оборудование находится в неисправном состоянии.
2. «Отказ» является событием, в отличие от «неисправности», которая является состоянием.
3. Это понятие, как оно определено, не применяют коборудованиюобъекту, состоящему только из программных средств.
4. На практике термины «отказ» и «неисправность» часто используют как синонимы.
[ГОСТ ЕН 1070-2003]
[ ГОСТ Р ИСО 13849-1-2003]
[ ГОСТ Р МЭК 60204-1-2007]
отказ
Событие, заключающееся в нарушении работоспособного состояния объекта.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
[СО 34.21.307-2005]
отказ
Событие, заключающееся в нарушении работоспособного состояния машины и (или) оборудования вследствие конструктивных нарушений при проектировании, несоблюдения установленного процесса производства или ремонта, невыполнения правил или инструкций по эксплуатации.
[Технический регламент о безопасности машин и оборудования]EN
failure
the termination of the ability of an item to perform a required function
NOTE 1 – After failure the item has a fault.
NOTE 2 – "Failure" is an event, as distinguished from "fault", which is a state.
NOTE 3 – This concept as defined does not apply to items consisting of software only.
[IEV number 191-04-01]
NOTE 4 - In practice, the terms fault and failure are often used synonymously
[IEC 60204-1-2006]FR
défaillance
cessation de l'aptitude d'une entité à accomplir une fonction requise
NOTE 1 – Après défaillance d'une entité, cette entité est en état de panne.
NOTE 2 – Une défaillance est un passage d'un état à un autre, par opposition à une panne, qui est un état.
NOTE 3 – La notion de défaillance, telle qu'elle est définie, ne s'applique pas à une entité constituée seulement de logiciel.
[IEV number 191-04-01]Тематики
- безопасность в целом
- безопасность гидротехнических сооружений
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
DE
FR
отказ (в работе)
выход из строя
повреждение
поломка
неисправность
несрабатывание
сбой
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
отказ (объекта)
Событие, заключающееся в нарушении работоспособного состояния объекта (ГОСТ 27. 002).
[ОСТ 45.152-99 ]Тематики
- тех. обсл. и ремонт средств электросвязи
EN
отказ
Прекращение способности функционального блока выполнять необходимую функцию.
Примечания
1. Определение в МЭС 191-04-01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382-14-01-11].
2. Соотношение между сбоями и отказами в МЭК 61508 и МЭС 60050(191) см. на рисунке.
3. Характеристики требуемых функций неизбежно исключают определенные режимы работы, некоторые функции могут быть определены путем описания режимов, которых следует избегать. Возникновение таких режимов представляет собой отказ.
4. Отказы являются либо случайными (в аппаратуре), либо систематическими (в аппаратуре или в программном обеспечении).
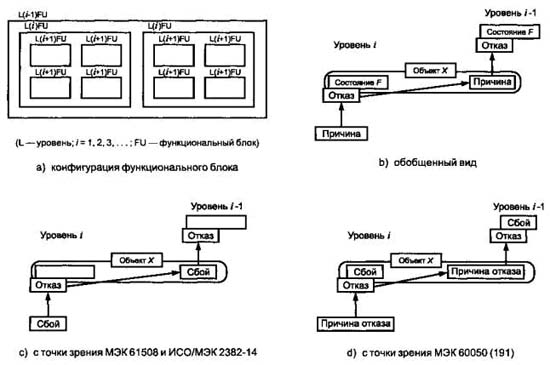
Рис. Модель отказа
Примечания
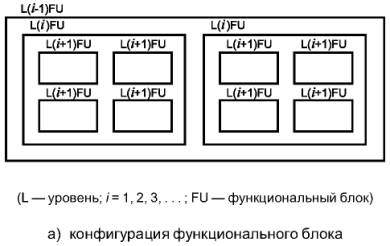
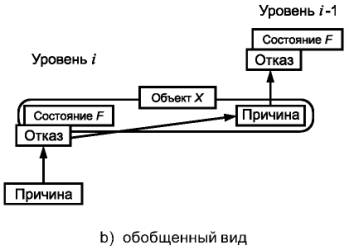
1. Как показано на рисунке а), функциональный блок может быть представлен в виде многоуровневой иерархической конструкции, каждый из уровней которой может быть, в свою очередь, назван функциональным блоком. На уровне i «причина» может проявить себя как ошибка (отклонение от правильного значения или состояния) в пределах функционального блока, соответствующего данному уровню i. Если она не будет исправлена или нейтрализована, эта ошибка может привести к отказу данного функционального блока, который в результате перейдет в состояние F, в котором он более не может выполнять необходимую функцию (см. рисунок b)). Данное состояние F уровня i может в свою очередь проявиться в виде ошибки на уровне функционального блока i - 1, которая, если она не будет исправлена или нейтрализована, может привести к отказу функционального блока уровня i - 1.
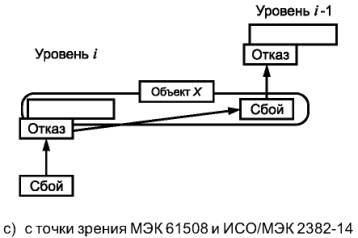
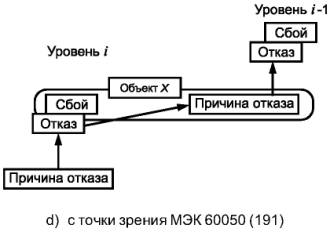
2. В этой причинно - следственной цепочке один и тот же элемент («объект X ») может рассматриваться как состояние F функционального блока уровня i, в которое он попадает в результате отказа, а также как причина отказа функционального блока уровня i - 1. Данный «объект X » объединяет концепцию «отказа» в МЭК 61508 и ИСО/МЭК 2382-14, в которой внимание акцентируется на причинном аспекте, как показано на рисунке c), и концепцию «отказа» из МЭС 60050(191), в которой основное внимание уделено аспекту состояния, как показано на рисунке d). В МЭС 60050(191) состояние F называется отказом, а в МЭК 61508 и ИСО/МЭК 2382-14 оно не определено.
3. В некоторых случаях отказ или ошибка могут быть вызваны внешним событием, таким как молния или электростатические помехи, а не внутренним отказом. Более того, ошибка (в обоих словарях) может возникать без предшествующего отказа. Примером такой ошибки может быть ошибка проектирования.
[ ГОСТ Р МЭК 61508-4-2007]Тематики
EN
повреждение
Неспособность машины выполнять заданную функцию.
Примечание 1
Неисправность, отказ в работе машины является результатом ее повреждения.
Примечание 2
Повреждение является событием в отличие от неисправности и отказа, которые являются состоянием.
Примечание 3
Рассматриваемое понятие не распространяется на программное обеспечение (см. МЭС 191-04-01
[ ГОСТ Р ИСО 12100-1:2007]
повреждение
Событие, заключающееся в нарушении исправного состояния объекта при сохранении работоспособного состояния.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
повреждение
По ГОСТ 13377-75
[ ГОСТ 24166-80]EN
damage
any change in visual appearance or alteration of mechanical integrity
[IEC 60571, ed. 2.0 (1998-02)]
damage
degradation of a component leading to penetration by acid or moisture
[IEC 62662, ed. 1.0 (2010-08)]FR
détérioration
tout changement dans l’aspect ou toute altération de l’intégrité mécanique
[IEC 60571, ed. 2.0 (1998-02)]Тематики
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
- ремонт судов
Обобщающие термины
EN
DE
FR
разрушение
Кинетический процесс зарождения и (или) развития трещин в результате действия внешних или внутренних напряжений, завершающегося разделением изделия (образца) на части. Разрушение классифицируют по разным признакам на следующие виды: по характеру силового воздействия на статически кратковременное, статически длительное, усталостное и ударное (динамическое); по ориентировке макроскопической поверхности разрушения — на разрушение путем отрыва (поверхность разрушения перпендикулярна направлению наибольших растягивающих напряжений или среза (поверхность разрушения составляет угол около 45°); по величине пластической деформации, предшествующей разрушению — на хрупкое и вязкое; по расположению поверхности разрушения относительно структуры — на транскристаллическое (внутрикристалл.), интеркристаллическое (межкристалл.) и смешанное; по влиянию внешней среды — на водородное, жидкометаллическое, коррозионное и т.п. В механике разрушения различают три способа взаимного смещения поверхностей трещины: I — отрыв; II — поперечный и III — продольный (чистый) сдвиг. Если трещина распространяется так же легко (без заметных следов пластической деформации), как и ее зарождение, то разрушение называют хрупким. Когда распространение трещины значительно более энергоемкий (на несколько порядков), чем ее зарождение, процесс, сопровождаемый значительной пластической деформацией не только вблизи поверхности разрушения, но и в объеме тела, то разрушение вязкое. Энергетические затраты на распространение трещины определяет ее трещиностойкость. Характер разрушения проявляется в структуре поверхности излома, изучаемого фрактографией.
разрушение
Неровная поверхность, возникающая при разрушении фрагмента металла.
[ http://www.manual-steel.ru/eng-a.html]Тематики
EN
сбой (в информационных технологиях)
Потеря способности функционировать в соответствии со спецификацией или предоставлять требуемый результат. Термин «сбой» может быть использован по отношению к ИТ-услугам, процессам, видам деятельности, конфигурационным единицам и т. п. Сбой часто служит причиной инцидента.
[ http://www.dtln.ru/slovar-terminov]Тематики
EN
сбой (в информационных технологиях)
(ITIL Service Operation)
Потеря способности функционировать в соответствии со спецификацией или предоставлять требуемый результат. Этот термин может быть использован по отношению к ИТ-услугам, процессам, деятельности, конфигурационным единицам и т.п. Сбой часто служит причиной инцидента.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]EN
failure
(ITIL Service Operation)
Loss of ability to operate to specification, or to deliver the required output. The term may be used when referring to IT services, processes, activities, configuration items etc. A failure often causes an incident.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
EN
отказ (failure): Событие, заключающееся в нарушении работоспособного состояния объекта
[ ГОСТ 27.002-89, статья 3.3].
Источник: ГОСТ Р 52527-2006: Установки газотурбинные. Надежность, готовность, эксплуатационная технологичность и безопасность оригинал документа
3.5 отказ (failure): Прекращение способности элемента исполнять требуемую функцию.
Примечания
1 После отказа элемент становится неисправным.
2 Отказ является событием в отличие от неисправности, которая является состоянием.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.3. Отказ
Failure
Событие, заключающееся в нарушении работоспособного состояния объекта
Источник: ГОСТ 27.002-89: Надежность в технике. Основные понятия. Термины и определения оригинал документа
3.32 повреждение (failure): Неспособность машины выполнять заданную функцию.
Примечание 1 - Неисправность, отказ в работе машины является результатом ее повреждения.
Примечание 2 - Повреждение является событием в отличие от неисправности и отказа, которые являются состоянием.
Примечание 3 - Рассматриваемое понятие не распространяется на программное обеспечение (см. МЭС 191-04-01 [11]).
Источник: ГОСТ Р ИСО 12100-1-2007: Безопасность машин. Основные понятия, общие принципы конструирования. Часть 1. Основные термины, методология оригинал документа
3.4 отказ (failure): Утрата изделием способности выполнять требуемую функцию.
Примечание - Отказ является событием в отличие от неисправности, которая является состоянием.
Источник: ГОСТ Р ИСО 13379-2009: Контроль состояния и диагностика машин. Руководство по интерпретации данных и методам диагностирования оригинал документа
3.2 отказ (failure): Утрата объектом способности выполнять требуемую функцию1).
___________
1) Более детально см. [1].
Источник: ГОСТ Р 51901.12-2007: Менеджмент риска. Метод анализа видов и последствий отказов оригинал документа
3.29 отказ (failure): Событие, происходящее с элементом или системой и вызывающее один или оба следующих эффекта: потеря элементом или системой своих функций или ухудшение работоспособности до степени существенного снижения безопасности установки, персонала или окружающей среды.
Источник: ГОСТ Р 54382-2011: Нефтяная и газовая промышленность. Подводные трубопроводные системы. Общие технические требования оригинал документа
3.1.3 отказ (failure): Потеря объектом способности выполнять требуемую функцию.
Примечания
1. После отказа объект имеет неисправность.
2. Отказ - это событие в отличие от неисправности, которое является состоянием.
3. Данное понятие по определению не касается программного обеспечения в чистом виде.
[МЭК 60050-191 ][1]
Источник: ГОСТ Р 50030.5.4-2011: Аппаратура распределения и управления низковольтная. Часть 5.4. Аппараты и элементы коммутации для цепей управления. Метод оценки рабочих характеристик слаботочных контактов. Специальные испытания оригинал документа
3.5 отказ (failure): Неспособность конструкции, системы или компонента функционировать в пределах критериев приемлемости.
[Глоссарий МАГАТЭ по безопасности, издание 2.0, 2006]
Примечание 1 - Отказ - это результат неисправности аппаратных средств, дефекта программного обеспечения, неисправности системы или ошибки оператора, связанной с ними сигнальной траекторией, которая и вызывает отказ.
Примечание 2 - См. также «дефект», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.3 отказ (failure): Утрата изделием способности выполнять требуемую функцию.
Примечание - Обычно отказ является следствием неисправности одного или нескольких узлов машины.
Источник: ГОСТ Р ИСО 17359-2009: Контроль состояния и диагностика машин. Общее руководство по организации контроля состояния и диагностирования оригинал документа
3.16 отказ (failure): Отклонение реального функционирования от запланированного. [МЭК 61513, пункт 3.21, изменено]
Источник: ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа
3.6.4 отказ (failure): Прекращение способности функционального блока выполнять необходимую функцию.
Примечания
1. Определение в МЭС 191-04-01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382-14-01-11].
2. Соотношение между сбоями и отказами в МЭК 61508 и МЭС 60050(191) см. на рисунке 4.
3. Характеристики требуемых функций неизбежно исключают определенные режимы работы, некоторые функции могут быть определены путем описания режимов, которых следует избегать. Возникновение таких режимов представляет собой отказ.
4. Отказы являются либо случайными (в аппаратуре), либо систематическими (в аппаратуре или в программном обеспечении), см. 3.6.5 и 3.6.6.
Примечания
1. Как показано на рисунке 4а), функциональный блок может быть представлен в виде многоуровневой иерархической конструкции, каждый из уровней которой может быть, в свою очередь, назван функциональным блоком. На уровне i «причина» может проявить себя как ошибка (отклонение от правильного значения или состояния) в пределах функционального блока, соответствующего данному уровню i. Если она не будет исправлена или нейтрализована, эта ошибка может привести к отказу данного функционального блока, который в результате перейдет в состояние F, в котором он более не может выполнять необходимую функцию (см. рисунок 4b)). Данное состояние F уровня i может в свою очередь проявиться в виде ошибки на уровне функционального блока i - 1, которая, если она не будет исправлена или нейтрализована, может привести к отказу функционального блока уровня i - 1.
2. В этой причинно-следственной цепочке один и тот же элемент («объект X») может рассматриваться как состояние F функционального блока уровня i, в которое он попадает в результате отказа, а также как причина отказа функционального блока уровня i - 1. Данный «объект X» объединяет концепцию «отказа» в МЭК 61508 и ИСО/МЭК 2382-14, в которой внимание акцентируется на причинном аспекте, как показано на рисунке 4с), и концепцию «отказа» из МЭС 60050(191), в которой основное внимание уделено аспекту состояния, как показано на рисунке 4d). В МЭС 60050(191) состояние F называется отказом, а в МЭК 61508 и ИСО/МЭК 2382-14 оно не определено.
3. В некоторых случаях отказ или ошибка могут быть вызваны внешним событием, таким как молния или электростатические помехи, а не внутренним отказом. Более того, ошибка (в обоих словарях) может возникать без предшествующего отказа. Примером такой ошибки может быть ошибка проектирования.
Рисунок 4 - Модель отказа
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.21 отказ (failure): Отклонение реального функционирования от запланированного (см. рисунок 3). [МЭК 60880-2, пункт 3.8]
Примечание 1 - Отказ является результатом сбоя в аппаратуре, программном обеспечении, системе или ошибки оператора или обслуживания и отражается на прохождении сигнала.
Примечание 2 - См. также «дефект», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
3.22 отказ (failure): Событие, заключающееся в нарушении работоспособного состояния элементов или систем платформы.
Источник: ГОСТ Р 54483-2011: Нефтяная и газовая промышленность. Платформы морские для нефтегазодобычи. Общие требования оригинал документа
5. Повреждение
D. Beschädigung
E. Failure
F. Endommagement
Источник: ГОСТ 24166-80: Система технического обслуживания и ремонта судов. Ремонт судов. Термины и определения оригинал документа
3.1.29 отказ (failure): Окончание способности изделия выполнять требуемую функцию.
Источник: ГОСТ Р 54828-2011: Комплектные распределительные устройства в металлической оболочке с элегазовой изоляцией (КРУЭ) на номинальные напряжения 110 кВ и выше. Общие технические условия оригинал документа
Англо-русский словарь нормативно-технической терминологии > failure
-
11 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
12 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
13 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
14 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
15 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
16 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
17 ACS
- система контроля и управления доступом
- система дополнительного или вспомогательного охлаждения ядерного реактора
- система аварийного теплоносителя ядерного реактора
- сервер управления доступом
- сервер вызова доступа
- секция доступа к каналу
- периодический впрыск теплоносителя в активную зону ядерного реактора при аварии
- НКУ распределения и управления для строительных площадок (НКУ СП)
- конструкция, расположенная над активной зоной ядерного реактора
- доступ
- выбор ограничений
- Американское химическое общество
- автоматический диспетчер вызовов
- автоматизированная система управления
- Acs
Американское химическое общество
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
автоматизированная система, управляющая
АСУ
Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек-оператор.
Примечание
В зависимости от объектов управления различают, например: АСУ П, когда объектом управления является предприятие; АСУ ТП, когда объектом управления является технологический процесс; ОАСУ, когда объектом управления является организационный объект или комплекс.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
автоматизированная система управления
АСУ
Совокупность математических методов, технических средств (компьютеров, средств связи, устройств отображения информации и т. д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом (процессом) в соответствии с заданной целью. АСУ принято делить на основу и функциональную часть. В основу входят информационное, техническое и математическое обеспечение. К функциональной части относят набор взаимосвязанных программ, автоматизирующих конкретные функции управления (планирование, финансово-бухгалтерскую деятельность и др.). Различают АСУ объектами (технологическими процессами - АСУТП, предприятием - АСУП, отраслью - ОАСУ) и функциональными автоматизированными системами, например, проектирования, расчетов, материально-технического и др. обеспечения.
[ http://www.morepc.ru/dict/]
автоматизированная система управления
АСУ
Система управления, в которой применяются современные автоматические средства обработки данных и экономико-математические методы для решения основных задач управления производственно-хозяйственной деятельностью. Это человеко-машинная система: в ней ряд операций и действий передается для исполнения машинам и другим устройствам (особенно это относится к так называемым рутинным, повторяющимся, стандартным операциям расчетов), но главное решение всегда остается за человеком. Этим АСУ отличаются от автоматических систем, т.е. таких технических устройств, которые действуют самостоятельно, по установленной для них программе, без вмешательства человека. АСУ подразделяются прежде всего на два класса: автоматизированные системы организационного управления и автоматизированные системы управления технологическими процессами (последние часто бывают автоматическими, первые ими принципиально быть не могут). Традиционно термин АСУ закрепился за первым из названных классов. Отличие АСУ от обычной, неавтоматизированной, но также использующей ЭВМ, системы управления показано на рис. А.1, а, б. Стрелками обозначены потоки информации. В первом случае компьютер используется для решения отдельных задач управления, например для производства плановых расчетов, результаты которых рассматриваются органом управления и либо принимаются, либо отвергаются. При этом необходимые данные собираются специально для решения каждой задачи и вводятся в компьютер, а потом за ненадобностью уничтожаются. Во втором случае существенная часть информации от объекта управления собирается непосредственно вычислительным центром, в том числе по каналам связи. При этом нет необходимости каждый раз вводить в компьютер все данные: часть из них (цены, нормативы и т. п.) хранится в ее запоминающем устройстве. Из вычислительного центра выработанные задания поступают, с одной стороны, в орган управления, а с другой (обычно через контрольное звено) — к объекту управления. В свою очередь информация, поступающая от объекта управления, влияет на принимаемые решения, т.е. здесь используется кибернетический принцип обратной связи. Это — АСУ. Принято рассматривать каждую АСУ одновременно в двух аспектах: с точки зрения ее функций — того, что и как она делает, и с точки зрения ее схемы, т.е. с помощью каких средств и методов эти функции реализуются. Соответственно АСУ подразделяют на две группы подсистем — функциональные и обеспечивающие. Создание АСУ на действующем экономическом объекте (в фирме, на предприятии, в банке и т.д.) — не разовое мероприятие, а длительный процесс. Отдельные подсистемы АСУ проектируются и вводятся в действие последовательными очередями, в состав функций включаются также все новые и новые задачи; при этом АСУ органически «вписывается» в систему управления. Обычно первые очереди АСУ ограничиваются решением чисто информационных задач. В дальнейшем их функции усложняются, включая использование оптимизационных расчетов, элементов оптимального управления. Степень участия АСУ в процессах управления может быть весьма различной, вплоть до самостоятельной выдачи компьютером, на основе получаемых им данных, оперативных управляющих «команд». Поскольку внедрение АСУ требует приспособления документации для машинной обработки, создаются унифицированные системы документации, а также классификаторы технико-экономической информации и т.д. Экономическая эффективность АСУ определяется прежде всего ростом эффективности самого производства в результате лучшей загрузки оборудования, повышения ритмичности, сокращения незавершенного производства и других материальных запасов, повышения качества продукции. РисА.1. Системы управления с использованием компьютеров а — неавтоматизированная, б — автоматизированная; I — управляющий центр; II — автоматизированная управляемая система (например, производство), III — контроль; тонкая черная стрелка — канал непосредственного управления компьютером некоторыми технологическими процессами (бывает не во всех АСУ); тонкая пунктирная стрелка показывает ту часть информации, которая поступает непосредственно в центр, минуя компьютер.
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
автоматический диспетчер вызовов
Устройство автоматической обработки входящих вызовов в соответствии с заданной программой переадресации и приоритетами. Такое устройство может работать в составе УАТС или подключаться непосредственно к входящим линиям. В его задачи входит только переадресация, а такие функции, как запись вызова, его удержание на линии и другие в ACS не поддерживаются.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
выбор ограничений
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
доступ
обращение
-.
[ http://www.morepc.ru/dict/]
доступ
Процедура обращения абонента, процесса, устройства к общесетевым ресурсам системы.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- информационные технологии в целом
- электросвязь, основные понятия
Синонимы
EN
конструкция, расположенная над активной зоной ядерного реактора
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
НКУ распределения и управления для строительных площадок (НКУ СП)
Комбинация одного или нескольких трансформаторных устройств или коммутационных аппаратов с устройствами управления, измерения, сигнализации, защиты и регулирования со всеми внутренними электрическими и механическими соединениями и конструктивными элементами, разработанная и изготовленная для применения на любых строительных площадках — для наружной и внутренней установки.
[ ГОСТ Р 51321. 4-2000 ( МЭК 60439-4-90)]EN
low-voltage switchgear and controlgear assembly for construction sites (ACS)
combination of one or several transforming or switching devices with associated control, measuring, signalling, protective and regulating equipment complete with all their internal electrical and mechanical connections and structural parts, designed and built for use on all construction sites, indoors and outdoors
[IEC 60439-4, ed. 2.0 (2004-06)]FR
ensemble d'appareillage à basse tension utilisé sur les chantiers (EC)
combinaison d'un ou de plusieurs appareils de transformation ou de connexion avec équipements associés de commande, de mesure, de signalisation, de protection et de régulation complètement assemblés avec toutes leurs liaisons internes électriques et mécaniques et leurs éléments de construction (voir 2.4), conçue et construite pour être utilisée sur tous les chantiers, à l'intérieur et à l'extérieur.
[IEC 60439-4, ed. 2.0 (2004-06)]
Рис. ABB
Рис. ABB
Рис. ABBНКУ СП, устанавливаемое на ножках
НКУ СП, закрепляемое на вертикальной поверхности
НКУ СП розеточное
Параллельные тексты EN-RU
Assemblies for construction sites have different dimensions, ranging from the simple socket-outlet units to proper distribution boards in metal enclosure or insulating material.
These assemblies are usually mobile.
The Standard IEC 60439-4 establishes the particular requirements for this type of assemblies, making specific reference to mechanical strength and resistance to corrosion.
[ABB]НКУ для строительных площадок имеют разные размеры и функции - от простых розеточных до распределительных панелей в металлической или пластмассовой оболочке.
Данные НКУ обычно являются переносными.
Стандарт МЭК 60439-4 устанавливает дополнительные требования для НКУ данного типа, особенно по механической прочности и коррозионной стойкости.
[Перевод Интент]Тематики
- НКУ (шкафы, пульты,...)
EN
- ACS
- assemblies for construction sites
- low-voltage switchgear and controlgear assembly for construction sites
FR
периодический впрыск теплоносителя в активную зону ядерного реактора при аварии
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
секция доступа к каналу
Физический канал или набор каналов, соединяющий Оконечное оборудование передачи данных с (местной) Станцией коммутации. Сюда не входит никакая часть оборудования передачи данных или станции коммутации (МСЭ-Т Х.144, МСЭ-Т Х.145, МСЭ-Т Х.147).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
сервер вызова доступа
(МСЭ-Т Y.2261).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
сервер управления доступом
(МСЭ-Т M.3016).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
система аварийного теплоносителя ядерного реактора
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
система дополнительного или вспомогательного охлаждения ядерного реактора
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
система контроля и управления доступом
Совокупность совместно действующих технических средств (контроля и управления), предназначенных для контроля и управления доступом и обладающих технической, информационной, программной и эксплуатационной совместимостью.
[РД 25.03.001-2002]
система контроля доступа
система управления доступом
СКД
Одна из важнейших составляющих интегрированного комплекса систем и средств физической защиты. Системой контроля доступа называется совокупность программно-аппаратных средств и организационных мероприятий, с помощью которых решается задача контроля и управления посещением отдельных помещений, а также оперативный контроль персонала и времени его нахождения на территории объекта.
Интегрированная СКД реализуется, в общем случае, гармоничным взаимодействием интеллектуальных уровней управления:
(1) уровень систем - графический пользовательский интерфейс и сервер базы данных;
(2) уровень подсистем - главный контроллер (мультиплексор);
(3) уровень локальных процессоров - локальные контроллеры, охранные панели.
Базовыми компонентами системы контроля доступа, управляемы тремя уровнями управления, являются: считыватели и идентификаторы, исполнительные устройства контроля доступа (турникеты, барьеры, замки, шлюзовые кабины, шлагбаумы, и т.п.), специализированные обнаружители (обнаружители металлов, обнаружители ядерных материалов, обнаружители взрывчатых веществ).
[ http://datasheet.do.am/forum/22-4-1]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > ACS
18 management information system
- управленческая информационная система
- информационно-управляющая система
- информационная система управления
- информационная система (в АСУ)
- административная информационная система
- автоматизированная система управления
автоматизированная система, управляющая
АСУ
Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек-оператор.
Примечание
В зависимости от объектов управления различают, например: АСУ П, когда объектом управления является предприятие; АСУ ТП, когда объектом управления является технологический процесс; ОАСУ, когда объектом управления является организационный объект или комплекс.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
автоматизированная система управления
АСУ
Совокупность математических методов, технических средств (компьютеров, средств связи, устройств отображения информации и т. д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом (процессом) в соответствии с заданной целью. АСУ принято делить на основу и функциональную часть. В основу входят информационное, техническое и математическое обеспечение. К функциональной части относят набор взаимосвязанных программ, автоматизирующих конкретные функции управления (планирование, финансово-бухгалтерскую деятельность и др.). Различают АСУ объектами (технологическими процессами - АСУТП, предприятием - АСУП, отраслью - ОАСУ) и функциональными автоматизированными системами, например, проектирования, расчетов, материально-технического и др. обеспечения.
[ http://www.morepc.ru/dict/]
автоматизированная система управления
АСУ
Система управления, в которой применяются современные автоматические средства обработки данных и экономико-математические методы для решения основных задач управления производственно-хозяйственной деятельностью. Это человеко-машинная система: в ней ряд операций и действий передается для исполнения машинам и другим устройствам (особенно это относится к так называемым рутинным, повторяющимся, стандартным операциям расчетов), но главное решение всегда остается за человеком. Этим АСУ отличаются от автоматических систем, т.е. таких технических устройств, которые действуют самостоятельно, по установленной для них программе, без вмешательства человека. АСУ подразделяются прежде всего на два класса: автоматизированные системы организационного управления и автоматизированные системы управления технологическими процессами (последние часто бывают автоматическими, первые ими принципиально быть не могут). Традиционно термин АСУ закрепился за первым из названных классов. Отличие АСУ от обычной, неавтоматизированной, но также использующей ЭВМ, системы управления показано на рис. А.1, а, б. Стрелками обозначены потоки информации. В первом случае компьютер используется для решения отдельных задач управления, например для производства плановых расчетов, результаты которых рассматриваются органом управления и либо принимаются, либо отвергаются. При этом необходимые данные собираются специально для решения каждой задачи и вводятся в компьютер, а потом за ненадобностью уничтожаются. Во втором случае существенная часть информации от объекта управления собирается непосредственно вычислительным центром, в том числе по каналам связи. При этом нет необходимости каждый раз вводить в компьютер все данные: часть из них (цены, нормативы и т. п.) хранится в ее запоминающем устройстве. Из вычислительного центра выработанные задания поступают, с одной стороны, в орган управления, а с другой (обычно через контрольное звено) — к объекту управления. В свою очередь информация, поступающая от объекта управления, влияет на принимаемые решения, т.е. здесь используется кибернетический принцип обратной связи. Это — АСУ. Принято рассматривать каждую АСУ одновременно в двух аспектах: с точки зрения ее функций — того, что и как она делает, и с точки зрения ее схемы, т.е. с помощью каких средств и методов эти функции реализуются. Соответственно АСУ подразделяют на две группы подсистем — функциональные и обеспечивающие. Создание АСУ на действующем экономическом объекте (в фирме, на предприятии, в банке и т.д.) — не разовое мероприятие, а длительный процесс. Отдельные подсистемы АСУ проектируются и вводятся в действие последовательными очередями, в состав функций включаются также все новые и новые задачи; при этом АСУ органически «вписывается» в систему управления. Обычно первые очереди АСУ ограничиваются решением чисто информационных задач. В дальнейшем их функции усложняются, включая использование оптимизационных расчетов, элементов оптимального управления. Степень участия АСУ в процессах управления может быть весьма различной, вплоть до самостоятельной выдачи компьютером, на основе получаемых им данных, оперативных управляющих «команд». Поскольку внедрение АСУ требует приспособления документации для машинной обработки, создаются унифицированные системы документации, а также классификаторы технико-экономической информации и т.д. Экономическая эффективность АСУ определяется прежде всего ростом эффективности самого производства в результате лучшей загрузки оборудования, повышения ритмичности, сокращения незавершенного производства и других материальных запасов, повышения качества продукции. РисА.1. Системы управления с использованием компьютеров а — неавтоматизированная, б — автоматизированная; I — управляющий центр; II — автоматизированная управляемая система (например, производство), III — контроль; тонкая черная стрелка — канал непосредственного управления компьютером некоторыми технологическими процессами (бывает не во всех АСУ); тонкая пунктирная стрелка показывает ту часть информации, которая поступает непосредственно в центр, минуя компьютер.
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
административная информационная система
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
информационная система (в АСУ)
Компьютерная система сбора, хранения, накопления, поиска и передачи данных, применяемых в процессе управления, планирования и организации производства. Это информационная подсистема автоматизированной системы управления. Она обычно включает следующие части: информационно-справочный фонд (архив, библиотека данных), язык АСУ, т.е. совокупность знаков и классификаторов (и правил обращения с ними), а также комплекс моделей и программ, обеспечивающих функционирование системы. Современные И.с. часто выступают как интегрированные системы обработки данных. При формировании И.с. АСУ изучаются задачи управления и связи между ними. На этой основе выявляются нужные для их решения сведения и, следовательно, потребность в информации; отбрасываются ненужные потоки информации, дополняются полезные потоки; устанавливаются периодичность и адреса поступления информации.
[ http://slovar-lopatnikov.ru/]Тематики
EN
информационная система управления
ИСУ
Система, обеспечивающая получение прошлых, настоящих и предполагаемых данных о внутренних операциях и внешних событиях. Своевременно предоставляя информацию, необходимую для принятия решений, она поддерживает такие функции предприятия, как планирование, контроль и оперативное управление.
[ http://www.lexikon.ru/dict/uprav/index.html]Тематики
Синонимы
EN
информационно-управляющая система
Формальная система обеспечения руководителей информацией, необходимой для принятия решений.
[ http://tourlib.net/books_men/meskon_glossary.htm]Тематики
EN
управленческая информационная система
УИС
(ITIL Service Design)
Набор инструментов, данных и информации, который используется для поддержки процесса или функции. Примеры управленческой информационной системы – система управления доступностью, система управления подрядчиками и контрактами.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
система управленческая информационная
Система, состоящая из взаимосвязанных подсистем, которые выдают информацию, необходимую для управления фирмой, при этом бухгалтерская подсистема является наиболее важной, так как она играет ведущую роль в управлении потоком экономических данных и направлении их во всех подразделения фирмы, а также заинтересованным лицам вне фирмы.
[ http://www.lexikon.ru/dict/buh/index.html]EN
management information system
MIS
(ITIL Service Design) A set of tools, data and information that is used to support a process or function. Examples include the availability management information system and the supplier and contract management information system. See also service knowledge management system.
[Словарь терминов ITIL® версия 1.0, 29 июля 2011 г.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > management information system
19 Kontaktglied
контакт-деталь
Одна из токопроводящих частей 1), образующих контакт.
МЭК 60050(441-15-06).
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
1) Должно быть проводящих
[Интент]
контакт-деталь
Деталь, соприкасающаяся с другой при образовании электрического контакта
[ ГОСТ 14312-79]EN
contact (piece)
one of the conductive parts forming a contact
[IEV number 441-15-06 ]FR
(pièce de) contact
une des pièces conductrices formant un contact
[IEV number 441-15-06 ]1. Коммутирующая электрическая контакт-деталь
[IEV number 444-04-06]EN
- Contact set - контактная группа
-
Ouput circuit - выходная цепь
contact circuit - цепь контакта
contact - контакт - Contact member - контактный элемент (контактная пружина)
- рабочая поверхность контакт-детали
-
Contact (piece) - контакт деталь
FR
- Jeu de contacts - контактная группа
-
Circuit de sortie - выходная цепь
circuit de contact - цепь контакта
contact - контакт - Element de contact - контактный элемент (контактная пружина)
- рабочая поверхность контакт-детали
-
Piece de contact - контакт-деталь
[Перевод Интент]
Типы коммутирующих электрических контакт-деталей (контактов) по ГОСТ 3884-77
ПП - с плоской рабочей и нерабочей поверхностями
ПР - с плоской рабочей поверхностью и с рельефом для сварки (сферическим или цилиндрическим) со стороны нерабочей поверхности
ПШ - с плоской рабочей поверхностью и с коническим шипом на нерабочей поверхности
СС - со сферической рабочей и сферической нерабочей поверхностями
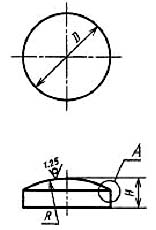
СП - со сферической рабочей поверхностью и плоской нерабочей поверхностью
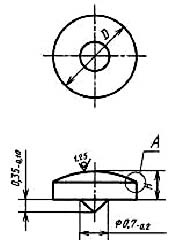
СШ - со сферической рабочей поверхностью и коническим шипом на нерабочей поверхности
СР - со сферической рабочей поверхностью и рельефом для сварки (сферическим или цилиндрическим) на нерабочей поверхности
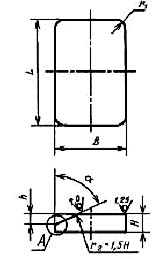
ПуП - с усеченной плоской рабочей поверхностью и плоской нерабочей поверхностью
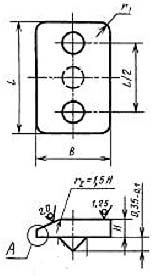
ПуШ - с усеченной плоской рабочей поверхностью и коническим шипом на нерабочей поверхности
ПуР - с усеченной плоской рабочей поверхностью и рельефом для сварки (сферическим или цилиндрическим) на нерабочей поверхности
ЦП - с цилиндрической рабочей поверхностью и плоской нерабочей поверхностью
ЦШ - с цилиндрической рабочей поверхностью и коническим шипом на нерабочей поверхности
ЦР - с цилиндрической рабочей поверхностью и рельефом для сварки (сферическим или цилиндрическим) на нерабочей поверхности
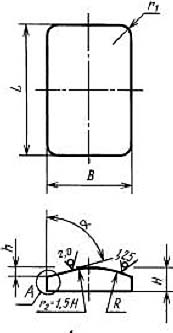
ЦуП - с усеченной цилиндрической рабочей поверхностью и плоской нерабочей поверхностью
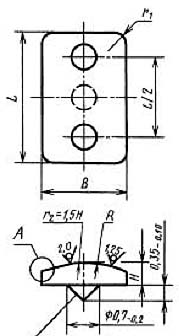
ЦуШ - с усеченной цилиндрической рабочей поверхностью и коническим шипом на нерабочей поверхности
2. Контакт-деталь электрического соединителя

Рис. Tyco Electronics
Извлекаемые штампованные контакты электрического соединителя:
1 - Гнездовая контакт-деталь (гнездовой контакт)
2 - Штыревая контакт-деталь (штыревой контакт)3. Контакт-деталь, как часть разборного или неразборного контактного электрического соединения
Требования к подготовке рабочих поверхностей контакт-деталей
1. Контакт-детали, имеющие два и более отверстий под болты в поперечном ряду, рекомендуется выполнять с продольными разрезами, как показано на чертеже.
2. Рабочие поверхности контакт-деталей разборных контактных соединений и неразборных контактных соединений с линейной арматурой непосредственно перед сборкой должны быть подготовлены:
- медные без покрытия и алюмомедные - зачищены.
При зачистке алюмомедных проводов не должна быть повреждена медная оболочка;
- алюминиевые и из алюминиевых сплавов - зачищены и смазаны нейтральной смазкой (вазелин КВЗ по ГОСТ 15975-70, ЦИАТИМ-221 по ГОСТ 9433-80 или другими смазками с аналогичными свойствами).
Рекомендуемое время между зачисткой и смазкой не более 1 ч;
- рабочие поверхности, имеющие защитные металлические покрытия, - промыты органическим растворителем.
3. Рабочие поверхности медных контакт-деталей, соединяемых способом опрессовки, должны быть зачищены, если иное не указано в стандартах или технических условиях на конкретные виды электротехнических устройств.
Рабочие поверхности алюминиевых контакт-деталей должны быть зачищены и смазаны кварцевазелиновой пастой или другими смазками, пастами и компаундами с аналогичными свойствами.
4. Поверхности контакт-деталей, соединяемых сваркой или пайкой, должны быть предварительно зачищены, обезжирены или протравлены.
[ ГОСТ 10434-82]4. Контакт-деталь, устанавливаемая на печатной плате для присоединения проводов
Тематики
EN
DE
FR
контактный элемент
Деталь аппарата для цепей управления (неподвижная или подвижная, проводящая или изолированная) для замыкания или размыкания единственного пути прохождения тока в цепи.
Примечания:
1. Контактный элемент и механизм передачи усилия могут быть объединены в единый узел, но чаще один или несколько элементов могут быть скомбинированы с одним или несколькими механизмами передачи усилия, и их конструкция может быть разной.
2. В состав контактных элементов не входят катушки и магниты управления.
[ ГОСТ 50030.5.1-2005]
контактный элемент
контакт (2)
-
[IEV number 151-12-16]EN
contact member
contact (2)
conductive element intended to make an electric contact
[IEV number 151-12-16]FR
élément de contact, m
contact (2), m
élément conducteur destiné à établir un contact électrique
[IEV number 151-12-16]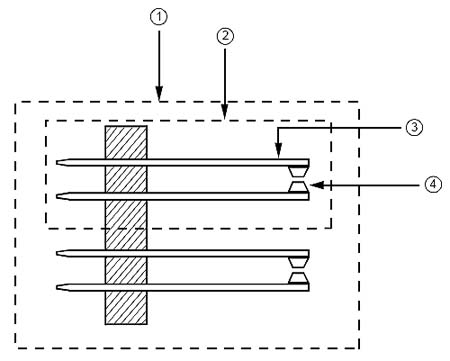
[IEV number 444-04-06]EN
- Contact set - контактная группа
-
Ouput circuit - выходная цепь
contact circuit - цепь контакта
contact - контакт - Contact member - контактный элемент
- Contact point - рабочая поверхность контакт-детали, контакт-деталь
FR
- Jeu de contacts - контактная группа
-
Circuit de sortie - выходная цепь
circuit de contact - цепь контакта
contact - контакт - Element de contact - контактный элемент
-
Piece de contact - рабочая поверхность контакт-детали, контакт-деталь
[Перевод Интент]
Примечания
1 - Контактный элемент такой конструкции как на рисунке слева называют также конактная пружина.
2 - По существу, контактный элемент, это одна из частей контакта,
т. е. в замыкающем, размыкающем и переключающем контактах любой подвижный и неподвижный контакт является контактным элементом.
[Интент]Тематики
Синонимы
EN
DE
FR
контактный элемент электрического реле
Проводящая часть контакта электрического реле, электрически изолированная от другой части или других частей, если цепь контакта электрического реле разомкнута
[ ГОСТ 16022-83]Тематики
EN
DE
FR
102. Контактный элемент электрического реле
D. Kontaktglied
E. Contact member
F. Elément de contact
Проводящая часть контакта электрического реле, электрически изолированная от другой части или других частей, если цепь контакта электрического реле разомкнута
Источник: ГОСТ 16022-83: Реле электрические. Термины и определения оригинал документа
Немецко-русский словарь нормативно-технической терминологии > Kontaktglied
20 MIS
- управленческая информационная система
- несоответствие (линии)
- информационно-управляющая система
- информационная система управления
- индикация многоадресного вторичного состояния
- административная информационная система
- автоматизированная система управления
автоматизированная система, управляющая
АСУ
Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек-оператор.
Примечание
В зависимости от объектов управления различают, например: АСУ П, когда объектом управления является предприятие; АСУ ТП, когда объектом управления является технологический процесс; ОАСУ, когда объектом управления является организационный объект или комплекс.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
автоматизированная система управления
АСУ
Совокупность математических методов, технических средств (компьютеров, средств связи, устройств отображения информации и т. д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом (процессом) в соответствии с заданной целью. АСУ принято делить на основу и функциональную часть. В основу входят информационное, техническое и математическое обеспечение. К функциональной части относят набор взаимосвязанных программ, автоматизирующих конкретные функции управления (планирование, финансово-бухгалтерскую деятельность и др.). Различают АСУ объектами (технологическими процессами - АСУТП, предприятием - АСУП, отраслью - ОАСУ) и функциональными автоматизированными системами, например, проектирования, расчетов, материально-технического и др. обеспечения.
[ http://www.morepc.ru/dict/]
автоматизированная система управления
АСУ
Система управления, в которой применяются современные автоматические средства обработки данных и экономико-математические методы для решения основных задач управления производственно-хозяйственной деятельностью. Это человеко-машинная система: в ней ряд операций и действий передается для исполнения машинам и другим устройствам (особенно это относится к так называемым рутинным, повторяющимся, стандартным операциям расчетов), но главное решение всегда остается за человеком. Этим АСУ отличаются от автоматических систем, т.е. таких технических устройств, которые действуют самостоятельно, по установленной для них программе, без вмешательства человека. АСУ подразделяются прежде всего на два класса: автоматизированные системы организационного управления и автоматизированные системы управления технологическими процессами (последние часто бывают автоматическими, первые ими принципиально быть не могут). Традиционно термин АСУ закрепился за первым из названных классов. Отличие АСУ от обычной, неавтоматизированной, но также использующей ЭВМ, системы управления показано на рис. А.1, а, б. Стрелками обозначены потоки информации. В первом случае компьютер используется для решения отдельных задач управления, например для производства плановых расчетов, результаты которых рассматриваются органом управления и либо принимаются, либо отвергаются. При этом необходимые данные собираются специально для решения каждой задачи и вводятся в компьютер, а потом за ненадобностью уничтожаются. Во втором случае существенная часть информации от объекта управления собирается непосредственно вычислительным центром, в том числе по каналам связи. При этом нет необходимости каждый раз вводить в компьютер все данные: часть из них (цены, нормативы и т. п.) хранится в ее запоминающем устройстве. Из вычислительного центра выработанные задания поступают, с одной стороны, в орган управления, а с другой (обычно через контрольное звено) — к объекту управления. В свою очередь информация, поступающая от объекта управления, влияет на принимаемые решения, т.е. здесь используется кибернетический принцип обратной связи. Это — АСУ. Принято рассматривать каждую АСУ одновременно в двух аспектах: с точки зрения ее функций — того, что и как она делает, и с точки зрения ее схемы, т.е. с помощью каких средств и методов эти функции реализуются. Соответственно АСУ подразделяют на две группы подсистем — функциональные и обеспечивающие. Создание АСУ на действующем экономическом объекте (в фирме, на предприятии, в банке и т.д.) — не разовое мероприятие, а длительный процесс. Отдельные подсистемы АСУ проектируются и вводятся в действие последовательными очередями, в состав функций включаются также все новые и новые задачи; при этом АСУ органически «вписывается» в систему управления. Обычно первые очереди АСУ ограничиваются решением чисто информационных задач. В дальнейшем их функции усложняются, включая использование оптимизационных расчетов, элементов оптимального управления. Степень участия АСУ в процессах управления может быть весьма различной, вплоть до самостоятельной выдачи компьютером, на основе получаемых им данных, оперативных управляющих «команд». Поскольку внедрение АСУ требует приспособления документации для машинной обработки, создаются унифицированные системы документации, а также классификаторы технико-экономической информации и т.д. Экономическая эффективность АСУ определяется прежде всего ростом эффективности самого производства в результате лучшей загрузки оборудования, повышения ритмичности, сокращения незавершенного производства и других материальных запасов, повышения качества продукции. РисА.1. Системы управления с использованием компьютеров а — неавтоматизированная, б — автоматизированная; I — управляющий центр; II — автоматизированная управляемая система (например, производство), III — контроль; тонкая черная стрелка — канал непосредственного управления компьютером некоторыми технологическими процессами (бывает не во всех АСУ); тонкая пунктирная стрелка показывает ту часть информации, которая поступает непосредственно в центр, минуя компьютер.
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
административная информационная система
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
индикация многоадресного вторичного состояния
Передается MCU оконечному устройству для информирования о том, что, поскольку другие оконечные устройства более высокой скорости участвуют в соединении конференц-связи, данное оконечное устройство не обязательно получит все сигналы, переданные этим оконечным устройствам (МСЭ-Т Н.230).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
информационная система управления
ИСУ
Система, обеспечивающая получение прошлых, настоящих и предполагаемых данных о внутренних операциях и внешних событиях. Своевременно предоставляя информацию, необходимую для принятия решений, она поддерживает такие функции предприятия, как планирование, контроль и оперативное управление.
[ http://www.lexikon.ru/dict/uprav/index.html]Тематики
Синонимы
EN
информационно-управляющая система
Формальная система обеспечения руководителей информацией, необходимой для принятия решений.
[ http://tourlib.net/books_men/meskon_glossary.htm]Тематики
EN
несоответствие (линии)
(МСЭ-Т G.984.3).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
управленческая информационная система
УИС
(ITIL Service Design)
Набор инструментов, данных и информации, который используется для поддержки процесса или функции. Примеры управленческой информационной системы – система управления доступностью, система управления подрядчиками и контрактами.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
система управленческая информационная
Система, состоящая из взаимосвязанных подсистем, которые выдают информацию, необходимую для управления фирмой, при этом бухгалтерская подсистема является наиболее важной, так как она играет ведущую роль в управлении потоком экономических данных и направлении их во всех подразделения фирмы, а также заинтересованным лицам вне фирмы.
[ http://www.lexikon.ru/dict/buh/index.html]EN
management information system
MIS
(ITIL Service Design) A set of tools, data and information that is used to support a process or function. Examples include the availability management information system and the supplier and contract management information system. See also service knowledge management system.
[Словарь терминов ITIL® версия 1.0, 29 июля 2011 г.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > MIS
СтраницыСм. также в других словарях:
Физиологические особенности культур микроскопических водорослей как фотосинтезирующих систем — Культуры микроскопических водорослей являются целостными фотосинтезирующими системами. Для получения высокой фотосинтетической продуктивности необходимо знание физиологических особенностей этих систем, а не только физиологии отдельной… … Биологическая энциклопедия
Особенности микроскопических водорослей как объектов массового культивирования — Микроскопические водоросли давно стали объектом разносторонних исследований. Благодаря малым размерам, относительной простоте морфологической организации и способов размножения эти водоросли сравнительно легко поддерживать в лаборатории… … Биологическая энциклопедия
Карта Карно — Рис. 1 Пример Куба Карно Куб Карно графический способ минимизации переключательных (булевых) функций, обеспечивающий относительную простоту работы с большими выражениями и устранение потенциальных гонок. Представляет собой операции попарного… … Википедия
ПОВАЛЫ ЖИВОТНЫХ — Рис. 1. Русский способ повала лошади. Рис. 1. Русский способ повала лошади. повалы животных на землю или операционный стол для выполнения хирургических операций.Повал лошадей. Русский способ. Выполняется усилиями 1—2 человек при помощи… … Ветеринарный энциклопедический словарь
ЗВУК И АКУСТИКА — Звук это колебания, т.е. периодическое механическое возмущение в упругих средах газообразных, жидких и твердых. Такое возмущение, представляющее собой некоторое физическое изменение в среде (например, изменение плотности или давления, смещение… … Энциклопедия Кольера
ВЕКТОР — В физике и математике вектор это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент,… … Энциклопедия Кольера
ГЕОМЕТРИЯ — раздел математики, занимающийся изучением свойств различных фигур (точек, линий, углов, двумерных и трехмерных объектов), их размеров и взаимного расположения. Для удобства преподавания геометрию подразделяют на планиметрию и стереометрию. В… … Энциклопедия Кольера
ЭЛЕКТРИЧЕСТВО И МАГНЕТИЗМ — раздел физики, охватывающий знания о статическом электричестве, электрических токах и магнитных явлениях. ЭЛЕКТРОСТАТИКА В электростатике рассматриваются явления, связанные с покоящимися электрическими зарядами. Наличие сил, действующих между… … Энциклопедия Кольера
ЭЛЕКТРОМАШИННЫЕ ГЕНЕРАТОРЫ И ЭЛЕКТРОДВИГАТЕЛИ — машины вращательного типа, преобразующие либо механическую энергию в электрическую (генераторы), либо электрическую в механическую (двигатели). Действие генераторов основано на принципе электромагнитной индукции: в проводе, движущемся в магнитном … Энциклопедия Кольера
АВИАЦИОННО-КОСМИЧЕСКИЕ КОНСТРУКЦИИ — Здесь рассматриваются основные (силовые) элементы конструкций самолетов и воздушно космических летательных аппаратов, современные материалы и важные конструктивные особенности авиационно космической техники. ОСНОВНЫЕ ОСОБЕННОСТИ КОНСТРУКТИВНЫХ… … Энциклопедия Кольера
ТЕРМОДИНАМИКА — раздел прикладной физики или теоретической теплотехники, в котором исследуется превращение движения в теплоту и наоборот. В термодинамике рассматриваются не только вопросы распространения теплоты, но и физические и химические изменения, связанные … Энциклопедия Кольера
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский